Los robots cuadrúpedos, como el renombrado Spot de Boston Dynamics, han capturado el interés público debido a su destreza para transitar sobre terrenos complicados como superficies irregulares y esquivar obstáculos, pero el subir escaleras seguía siendo un reto a conseguir. Ahora, este reto se ha logrado gracias a la Escuela Politécnica Federal de Zürich (ETH Zürich).
Robots cuadrúpedos subiendo escaleras
Aunque las escaleras son habituales en fábricas y otros entornos industriales, los cuadrúpedos seguían teniendo problemas al intentar subirlas con eficiencia.
Aquí entra en juego la ETH Zúrich, una entidad de prestigio en el campo de la robótica. Esta organización ha llevado a cabo investigaciones de gran envergadura sobre el perfeccionamiento de los robots cuadrúpedos y, recientemente, ha publicado una solución para el problema que suponen las escaleras para estos sistemas.
Tradicionalmente, los investigadores se centraban en autómatas bípedos humanoides que necesitaban escaleras fabricadas expresamente para ellos. A pesar del uso de estas escaleras concretas, la lentitud con la que se desplazaban estos robots los hacía poco funcionales en la realidad cotidiana.
Uso de efectores finales e inteligencia artificial
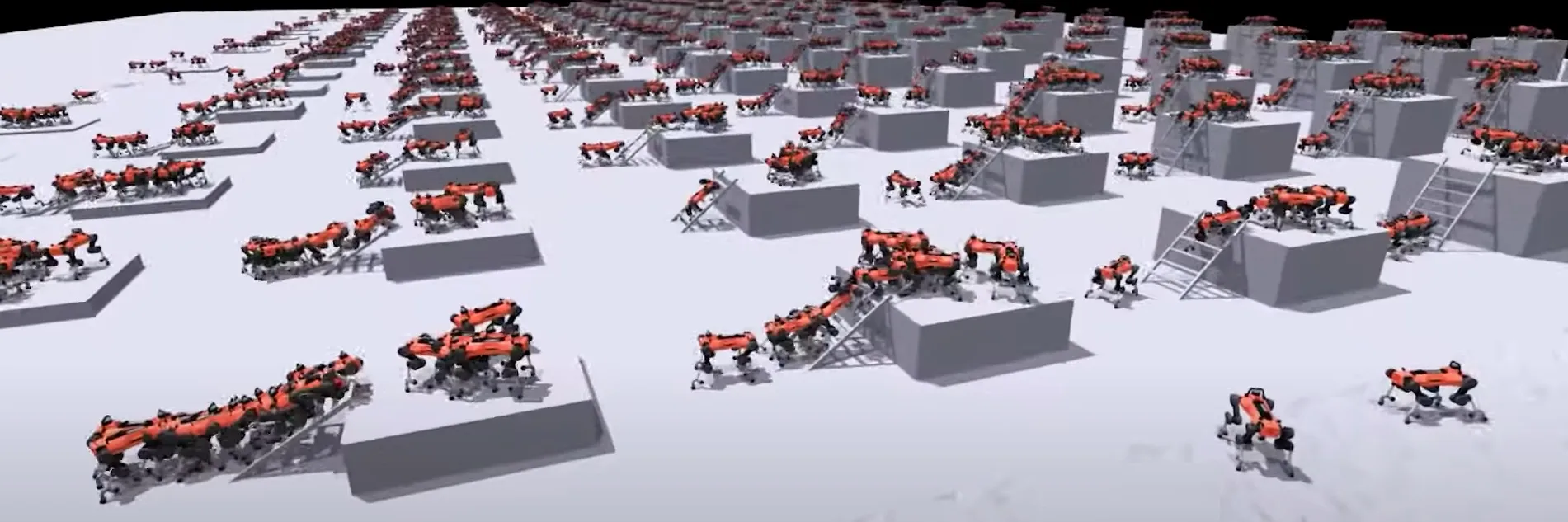
Sin embargo, el equipo de ETH Zúrich decidió reformular el enfoque y poner nuevamente en el centro al autómata ANYMal, desarrollado por ANYbotics, una empresa afiliada a la institución. Este cuadrúpedo ha sido dotado de mecanismos especializados en sus extremidades, denominados efectores finales, los cuales están diseñados para engancharse a los peldaños.

Como verás en el anterior vídeo, esta mejora mecánica le permite al robot obtener un agarre más firme y mayor estabilidad al subir escaleras, lo que ya constituye un progreso notable. Para ello, además de los efectores finales, se incorporó aprendizaje por refuerzo, una técnica avanzada de inteligencia artificial que permite al robot adaptarse y aprender según las características particulares de cada escalera.
El aprendizaje por refuerzo es un proceso mediante el cual el autómata optimiza su rendimiento a través de la experiencia. Cada vez que el robot escala una estructura, acumula datos sobre sus errores y logros, reajustando su comportamiento para obtener mejores resultados en la próxima ocasión. Esto implica que puede modificar en tiempo real su modo de actuar al detectar discrepancias en los cálculos o fallos en la sincronización de un paso, haciéndolo mucho más eficaz.
Según ETH Zúrich, la combinación de los efectores finales y el aprendizaje por refuerzo alcanzó una tasa de éxito del 90% al enfrentarse a escaleras con ángulos abruptos, entre los 70 y 90 grados. Además, al compararlo con otros sistemas robóticos de vanguardia, la rapidez de ascenso del ANYMal se incrementó en un factor de 232. Este aumento lo hace más viable para su implementación en entornos industriales, donde el tiempo es un recurso invaluable.
Palabras finales
La combinación de un diseño mecánico que responde a los escollos físicos de los peldaños con una inteligencia artificial que se nutre de la experiencia, sitúa a estos robots como herramientas cada vez más versátiles y ajustables.
Este progreso abre un horizonte de posibilidades para el uso de robots cuadrúpedos en una mayor variedad de escenarios industriales, ya que ahora pueden desplazarse con soltura en infraestructuras que previamente se consideraban inaccesibles para ellos. A medida que estos sistemas continúan refinándose, no resulta descabellado imaginar su presencia cada vez más habitual en fábricas y otros espacios laborales, ejecutando tareas que exigen movilidad y adaptabilidad en entornos intrincados.